|
||||||||||||||||||||
|
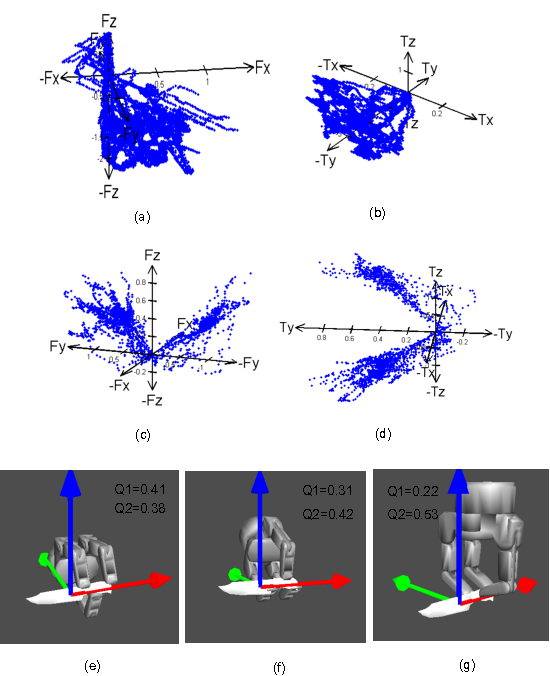
One difficulty of task-oriented grasp planning is task modeling. In this paper, a manipulation task was modeled by building a non-parametric statistical distribution model from disturbance data captured during demonstrations. This paper proposes a task-oriented grasp quality criterion based on distribution of task disturbance and uses the criterion to search for a grasp that covers the most significant part of the disturbance distribution. To reduce the computational complexity of the search in a high-dimensional robotic hand configuration space, as well as to avoid a correspondence problem, the candidate grasps are computed from a reduced configuration space that is confined by a set of given thumb placements and thumb directions. The proposed approach has been validated with a Barrett hand and a Shadow hand on several objects in simulation. The resulting grasps in the evaluation generated by our approach increase the coverage of frequently-occurring disturbance rather than the coverage of a large area with a scattered distribution. We proposes a grasp quality criterion, called the task coverage grasp quality metric, to compute the proportion of task disturbance that a grasp covers. Instead of assuming an evenly-distributed task wrench space, this approach takes into account the task disturbance distribution measured from human demonstration, since it is possible that disturbance wrenches in some directions occur more frequently than in other areas, even if they may be smaller than wrenches that occur less frequently. In two tool manipulations, for example, a knife and a fork have similar shapes but have disturbance wrench distribution along different directions, hence favoring different grasps. Therefore, a targeted grasp is prone to increasing the coverage of most frequent disturbances, rather than a grasp with the same coverage of the area with scattered distributed disturbance. To reduce the computational complexity of the search in high-dimensional robotic hand configuration space, as well as to avoid a correspondence problem, the candidate grasp is computed from a set of given thumb placements rather than contact points on an object surface. One advantage of thumb placement is that it is independent of the physical constraints of a given hand, which has the problem of solving the inverse kinematics that satisfies the constraints imposed by contact points. Every thumb placement is associated with the direction thumb should point to, which further reduce the search space of wrist positions and orientations.
Participants
Collaborators
Publication: This project is supported by USF startup grant |
|||||||||||||||||||