|
||||||||||||||||||||
|
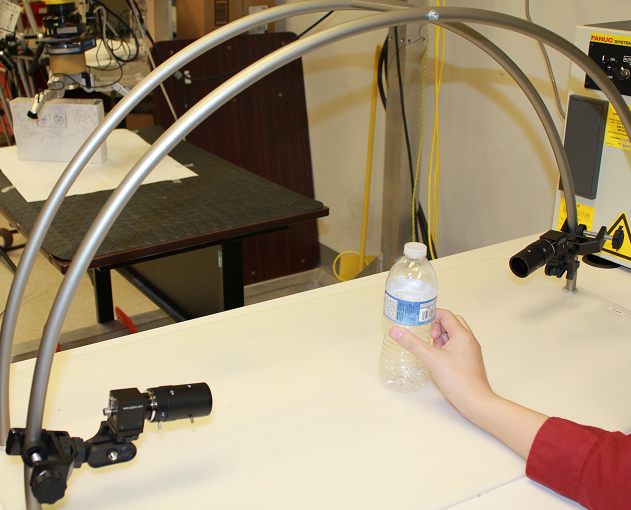
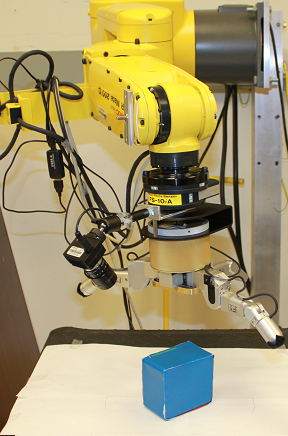
This research develops an full-hand finger force measurement platform to measure the fingertip force during several grasping tasks. Algorithms are developed to learn from human finger force adaptation skills. A demonstration platform is designed to measure the grasping force along with the hand and arm motion during a manipulation. A 5DT dataglove and a NaturalPoint motion capture system are used to measure the hand and arm motion. Two Point Grey Flea cameras are used to measure the fingertip force. Grasping processes of different tasks are recorded and analyzed with GMM and HMM. The learning results are then applied to the Barrett robotic hand to carry out the same task automatically with proper force and motion.
Participants
Collaborators John Hollerbach (University of Utah)
This project is supported by USF startup grant |
|||||||||||||||||||