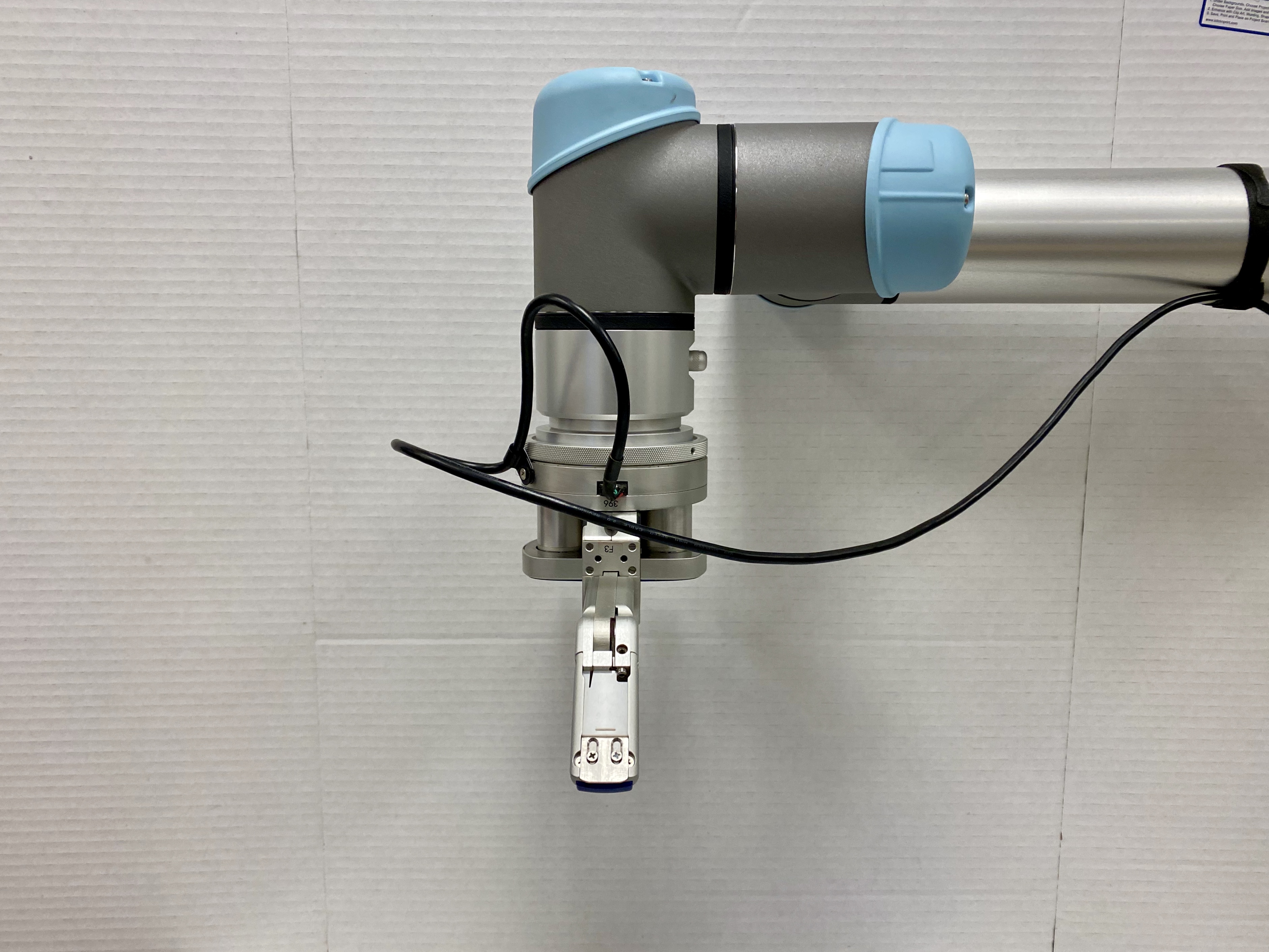
The lab is equipped with the UR5-e robot arm that is linked with the BH8-series Barrett Hand.
Fig 1. UR5e and Barrett Hand link
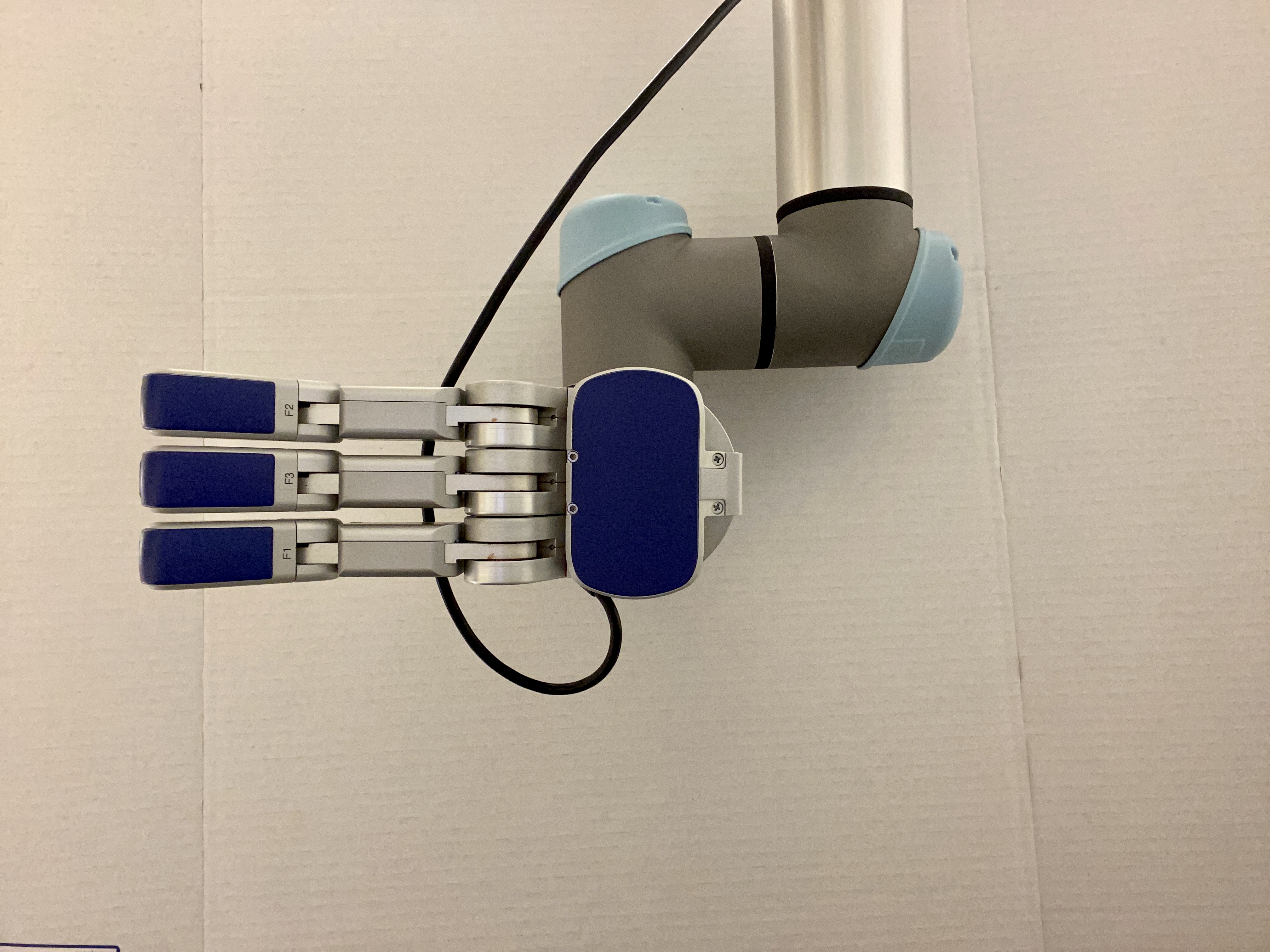
BH-282 Barrett Hand
Fig 2. Barrett Hand with spread set to 0%
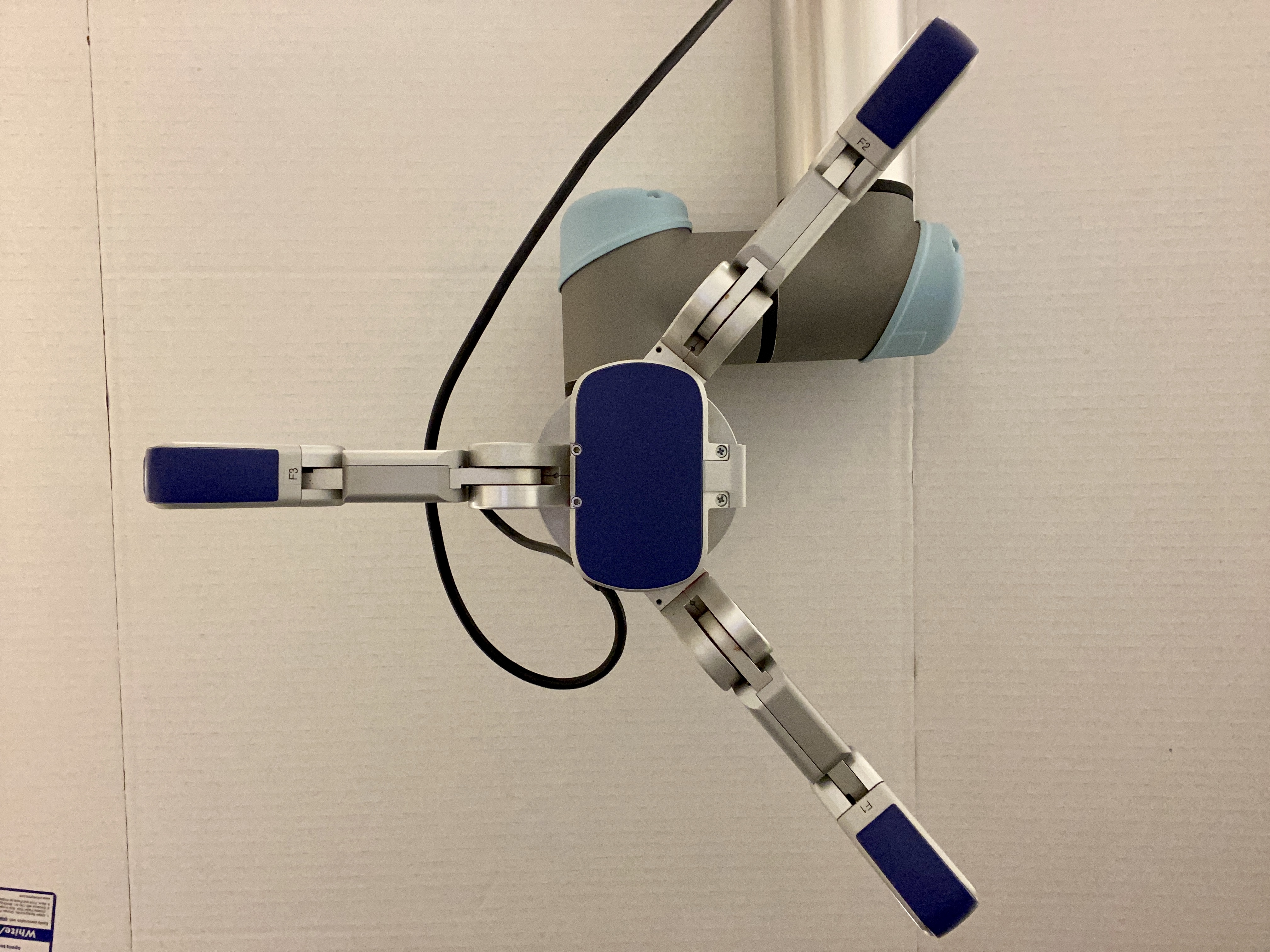
Fig 3. Barrett Hand with spread set to 50%
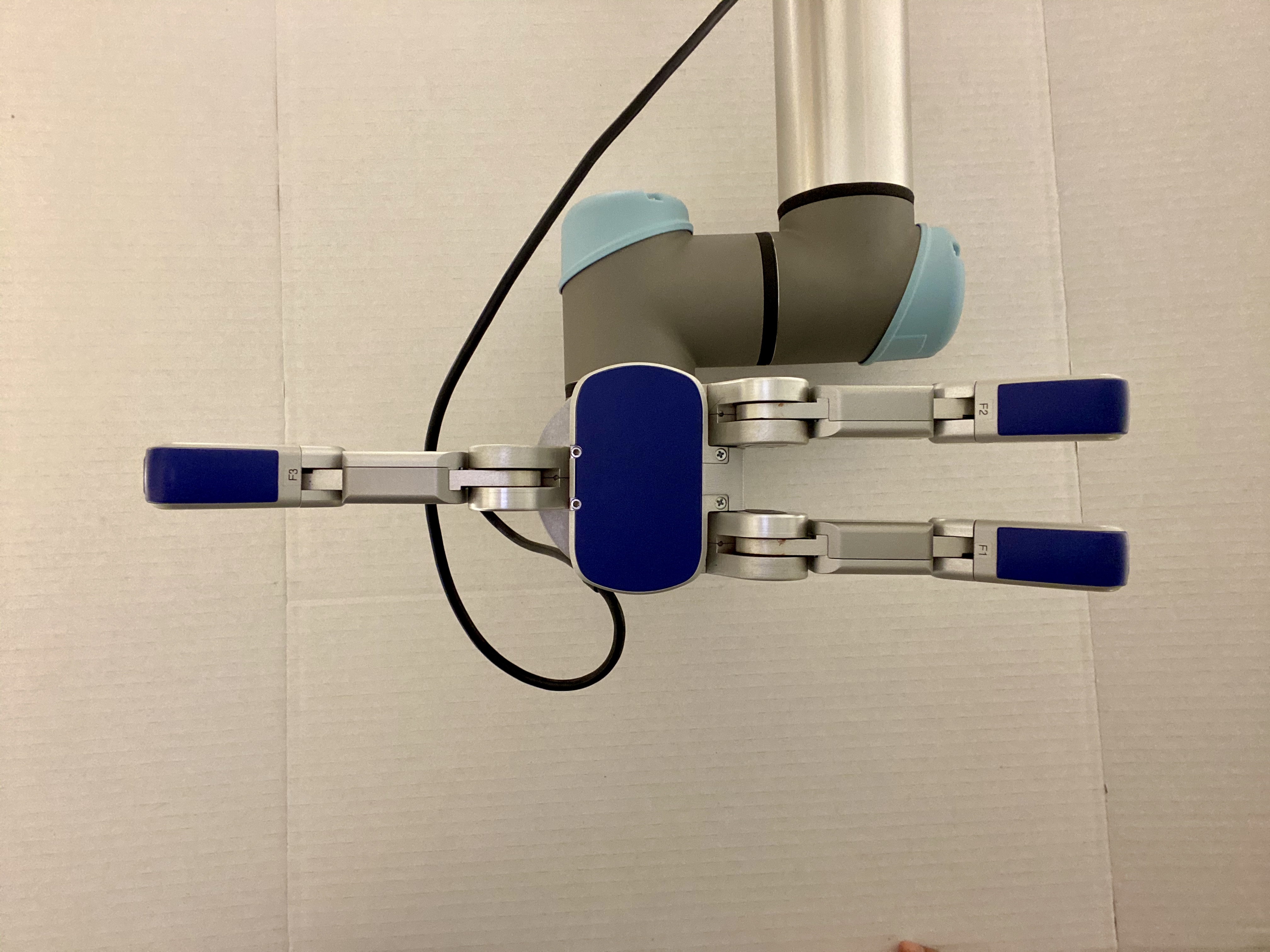
Fig 4. Barrett Hand with spread set to 100%
Built by Barrett Technology, the BH8-series Barrett Hand is a
multi-fingered programmable grasper with 4
Degrees of freedom (DOF). The Barrett Hand is equipped with
tactile sensors on the fingers and the palms. It also has a torque
sensor about the last joint in each finger. These provide localized
pressure readings across the palm and fingers. For more details
regarding the specifications consult the tables below:
Maximum payload
6.0 Kg / 13.23 lb
Finger speed
Finger open to close : 1.0 sec
Full 180 degree spread : 0.5 sec
Kinematics
Total fingers : 3 (1 fixed and 2 rotatable
Total hand axes : 8
Range of motion
Finger base joint : 140°
Fingertip joint : 45°
Finger spread : 180°
Fingertip torque sensors
Range : ±1 Nm
Resolution : ±0.04 Nm
Tactile sensors
Quantity : 96 Active cells
Range : 10 N/cm²
Palm resolution : 0.02 N/cell (cell area = 1.0 cm²)
Finger resolution : 0.01 N/cell (cell area = 0.3 cm²)
Fingertip resolution : 0.01 N/cell (cell area = 0.15 cm²)
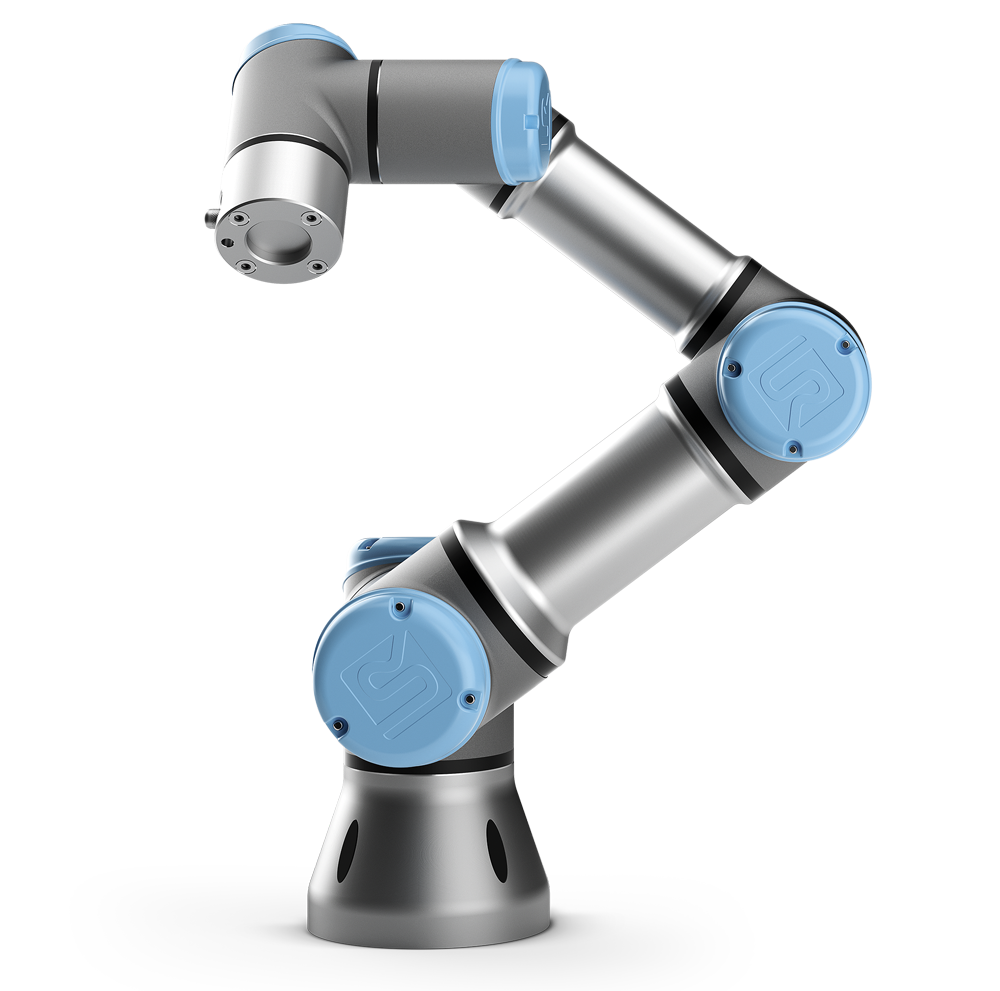
UR5e
Fig 5. UR5e image
Built by Universal Robotics, the UR5e is a lightweight and adaptable
robot. It has 6 DOF and is seamlessly linked with the barrett
hand mentioned above. For more details regarding the specifications
consult the tables below: