Another bottom-level yet important component within the robotic cooking pipeline is grasping. In order to use a tool during robotic cooking, the robot chef first needs to apply a firm grasping, which is influenced by different grasp planning algorithms, over the tool. We have published papers regarding grasp planning approaches in two main aspects: extraction from demonstration and maximizing task coverage.
Robot grasp planning based on demonstrated grasp strategies
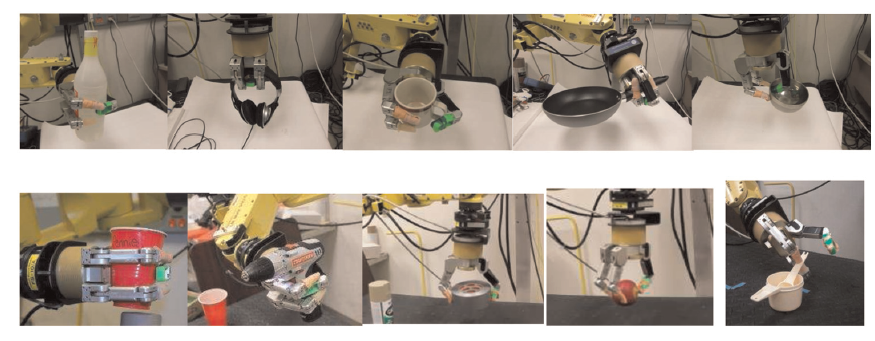
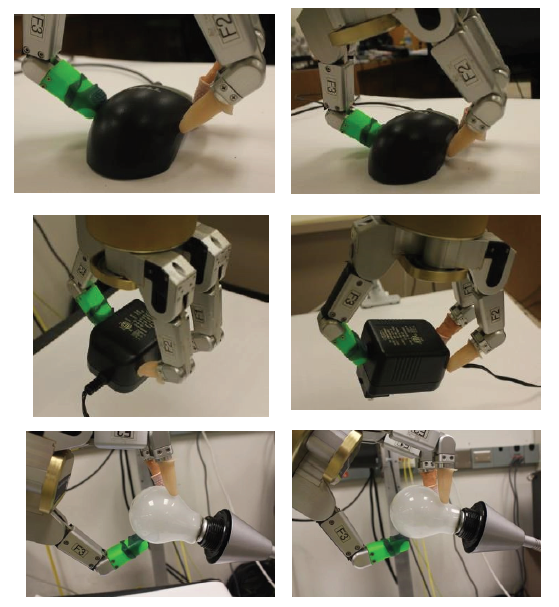
Human has developed the master skill in grasping during years of practicing and learning. In this paper, we show that grasp type and thumb placement, which commonly exist in almost all grasps, provide partial constraints of hand postures and wrist positions as well as orientations. They can be integrated into robotic grasp planning procedure to generate feasible grasp based on target object geometry and manipulation task. We have tested this grasp planning approach on both simulators and real system and the results that our approach tends to generate grasps that are closer to human-style and more robust dealing with perception uncertainties. Our approach can also be generalized to other robotic models by considering dimensionality differences between hand models.
Publication List
[2] Lin, Yun, and Yu Sun. “Grasp Planning to Maximize Task Coverage.” The International Journal of Robotics Research, vol. 34, no. 9, Aug. 2015, pp. 1195–1210
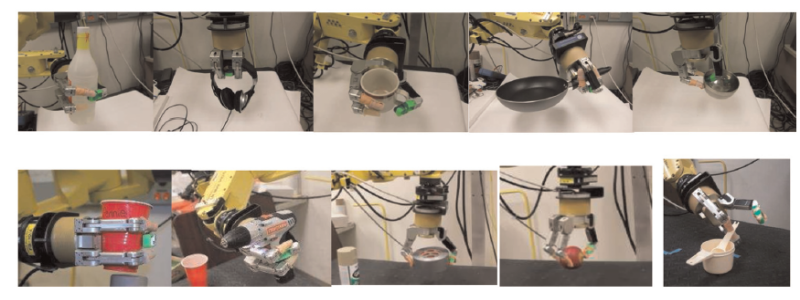
This paper presents a novel robot grasping planning approach that extracts grasp strategies (grasp type, and thumb placement and direction) from human demonstration and integrates them into the grasp planning procedure to generate a feasible grasp concerning the target object geometry and manipulation task.
[1] Lin, Yun, and Yu Sun. “Robot Grasp Planning Based on Demonstrated Grasp Strategies.” The International Journal of Robotics Research, vol. 34, no. 1, Jan. 2015, pp. 26–42
This paper proposes a task-oriented grasp quality metric based on distribution of task disturbance, which could be used to search for a grasp that covers the most significant part of the disturbance distribution. Rather than using a uniformly distributed task wrench space, this paper models a manipulation task with a non-parametric statistical distribution model built from the disturbance data captured during the task demonstrations.