|
||||||||||||||||||||||||||
|
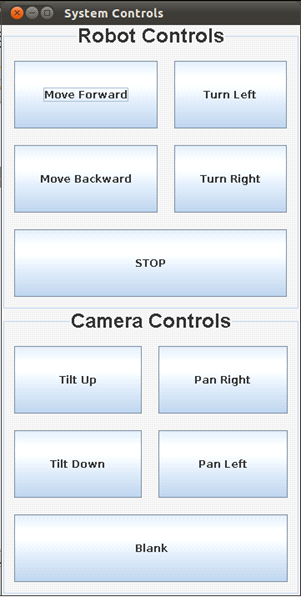
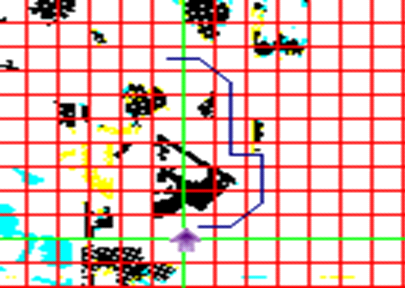
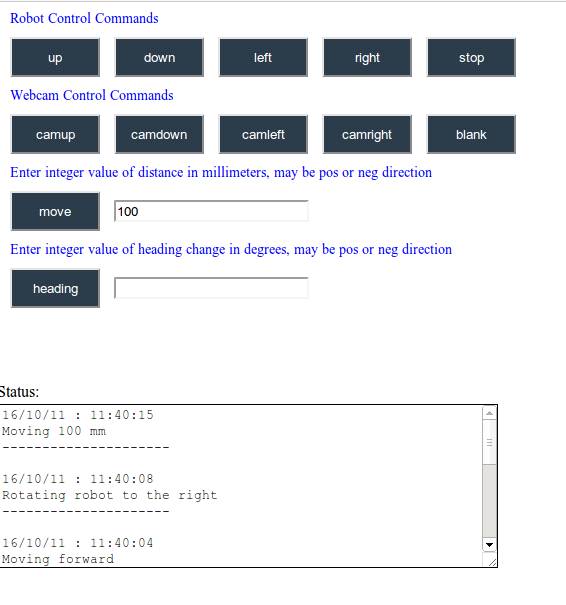
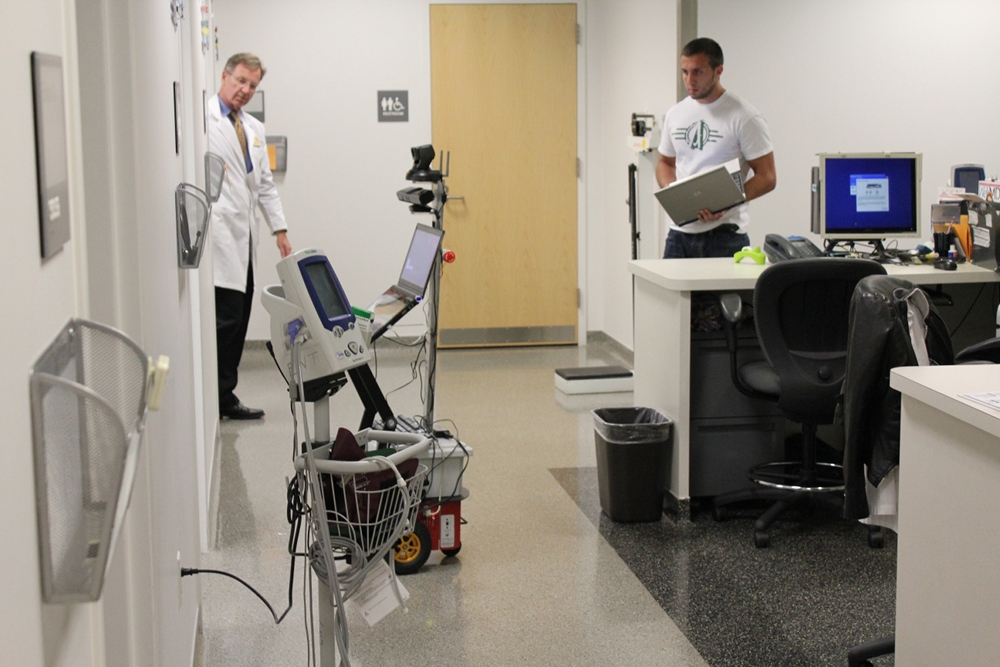
The project is to design an open-source based robotic telemedicine system (Figure 1) for the Moffitt Cancer Center. Currently available commercial solutions are either proprietary, or lack features, such as quality communication equipment. We have designed and implemented a system that is capable to navigate in a clinical environment with minimum human intervention. The robot uses a Kinect sensor to map the environment and plan a path and trajectory to navigate to a defined goal position automatically (Figure 3). A doctor can either drive the robot remotely through Internet (Figure 2,4) or simply provide the robot a desired position to reach. The telemedicine platform can also provide high quality video communication to allow a doctor to see patients through a high-resolution camera on board so that the doctors can make early diagnoses.
Software: (Open Source) Telemedicine Robotic System Software on the Mobile PlatformParticipants:
Collaborators Thomas McCaffrey (Moffitt Cancer Center)
This project is supported by USF startup grant and Moffitt. |
|||||||||||||||||||||||||